PCL
Install
sudo apt install libpcl-dev
CMake
find_package(PCL QUIET)
include_directories(${PCL_INCLUDE_DIRS})
target_link_libraries(<target_name> ${PCL_LIBRARIES})
Header
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/filters/filter.h>
// 有关transform
#include <pcl/common/transforms.h>
Construct
智能指针和原始数据的相互转换
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ> cloud;
cloud = *cloud_ptr;
cloud_ptr = cloud.makeShared;
创建点云智能指针对象
// pcl::PointCloud<pcl::PointXYZI>::Ptr pc_ptr_ = nullptr // 创建时初始化不用nullptr
pcl::PointCloud<pcl::PointXYZI>::Ptr pc_ptr_(new pcl::PointCloud<pcl::PointXYZI>);
Custom PointCloud Msg
官方例程:detail
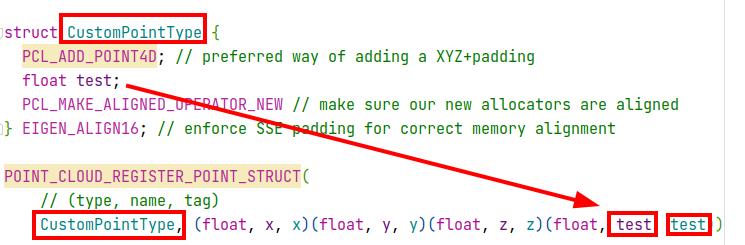
解读
#include <pcl/memory.h>
#include <pcl/pcl_macros.h>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/io/pcd_io.h>
struct CustomPointType
{
PCL_ADD_POINT4D
PCL_ADD_INTENSITY;
float roll;
float pitch;
float yaw;
double time;
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
} EIGEN_ALIGN16;
POINT_CLOUD_REGISTER_POINT_STRUCT (CustomPointType,
(float, x, x) (float, y, y)
(float, z, z) (float, intensity, intensity)
(float, roll, roll) (float, pitch, pitch) (float, yaw, yaw)
(double, time, time)
)
Downsample
typedef pcl::PointXYZ PointType;
pcl::PointCloud<PointType>::Ptr fcloud;
/// Applies Voxel Grid filter to cloud.
/// in: leaf_size (size of voxel, in meters), cloud (to be filtered)
/// out: (in class) fcloud (filtered cloud)
void applyVoxelFilter(float leaf_size, pcl::PointCloud<PointType>::Ptr cloud);
void applyVoxelFilter(float leaf_size, pcl::PointCloud<PointType>::Ptr cloud,
pcl::PointCloud<PointType>::Ptr fcloud) {
fcloud.reset(new pcl::PointCloud <PointType>);
pcl::VoxelGrid <PointType> vg;
vg.setInputCloud(cloud);
vg.setLeafSize(leaf_size, leaf_size, leaf_size);
vg.filter(*fcloud);
}
Geometry
KDtree
#include <pcl/point_cloud.h>
#include <pcl/kdtree/kdtree_flann.h>
// 建树
pcl::KdTreeFLANN<pcl::PointXYZ> kdtree;
kdtree.setInputCloud(cloud);
// 构建搜索点
pcl::PointXYZ searchPoint;
searchPoint.x = 1024.0f * rand () / (RAND_MAX + 1.0f);
searchPoint.y = 1024.0f * rand () / (RAND_MAX + 1.0f);
searchPoint.z = 1024.0f * rand () / (RAND_MAX + 1.0f);
// K nearest neighbor search
int K = 10;
std::vector<int> pointIdxNKNSearch(K); // 该向量有大小
std::vector<float> pointNKNSquaredDistance(K);
if (kdtree.nearestKSearch(searchPoint, K, pointIdxNKNSearch, pointNKNSquaredDistance) > 0)
// todo
std::vector<int> pointIdxRadiusSearch;
std::vector<float> pointRadiusSquaredDistance;
// 含半径约束的搜索
if (kdtree.radiusSearch(searchPoint, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance) > 0)
Transform
#include <pcl/common/transforms.h>
// 可以含强度信息
void Calibration::lidarToCameraPoints(pcl::PointCloud<PointType>::Ptr &pts){
pcl::transformPointCloud(*pts, *pts, lidar_extrinsic_);
}
Filter
Statistical Outlier Removal
对每个点找近邻点,该点称为核心点;认为邻域点到核心点的距离差(这个统计量)服从正态分布,若邻域点的距离差大于某个阈值则剔除掉该点
#include <pcl/point_types.h>
#include <pcl/filters/statistical_outlier_removal.h>
typedef pcl::PointXYZ PointT
int main(int argc, char **argv) {
pcl::PointCloud<PointT>::Ptr cloud(new pcl::PointCloud <PointT>);
pcl::PointCloud<PointT>::Ptr cloud_filtered(new pcl::PointCloud <PointT>);
// Create the filtering object
pcl::StatisticalOutlierRemoval <PointT> sor;
sor.setInputCloud(cloud);
// 样本数/领域点为50,标准差因子为1, query点的标准差大于1m时则认为是离群点
sor.setMeanK(50);
sor.setStddevMulThresh(1.0);
sor.filter(*cloud_filtered);
return (0);
}
Crop Filter
#include <pcl/filters/crop_box.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl_conversions/pcl_conversions.h>
typedef pcl::PointXYZRGB PointT;
// camera frame right, bottom, forward
constexpr float min_range[3] = {-2.5, -2.0, 0.0};
constexpr float max_range[3] = {2.5, 2.0, 3.0};
constexpr float leaf_size = 0.01;
pcl::PointCloud<PointT>::Ptr pointcloud_pcl(new pcl::PointCloud<PointT>);
pcl::CropBox<PointT> crop;
crop.setMin(Eigen::Vector4f(min_range[0], min_range[1], min_range[2], 1.0));
crop.setMax(Eigen::Vector4f(max_range[0], max_range[1], max_range[2], 1.0));
crop.setInputCloud(pointcloud_pcl);
crop.setKeepOrganized(true);
crop.filter(*pointcloud_pcl);
Subset
一般调用pcl的分割算法后,返回的是相关的索引。因此需要根据索引去进一步提取感兴趣的点云。
#include <pcl/filters/extract_indices.h>
pcl::PointCloud<pcl::PointXYZ>::Ptr input(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr output(new pcl::PointCloud<pcl::PointXYZ>);
// Create the filtering object
pcl::ExtractIndices<pcl::PointXYZ> extract;
// Extract the inliers
extract.setInputCloud(input);
// 点云索引
extract.setIndices(index_ptr);
// true:反相提取点云
extract.setNegative(false);
extract.filter(*output);
IO
Write
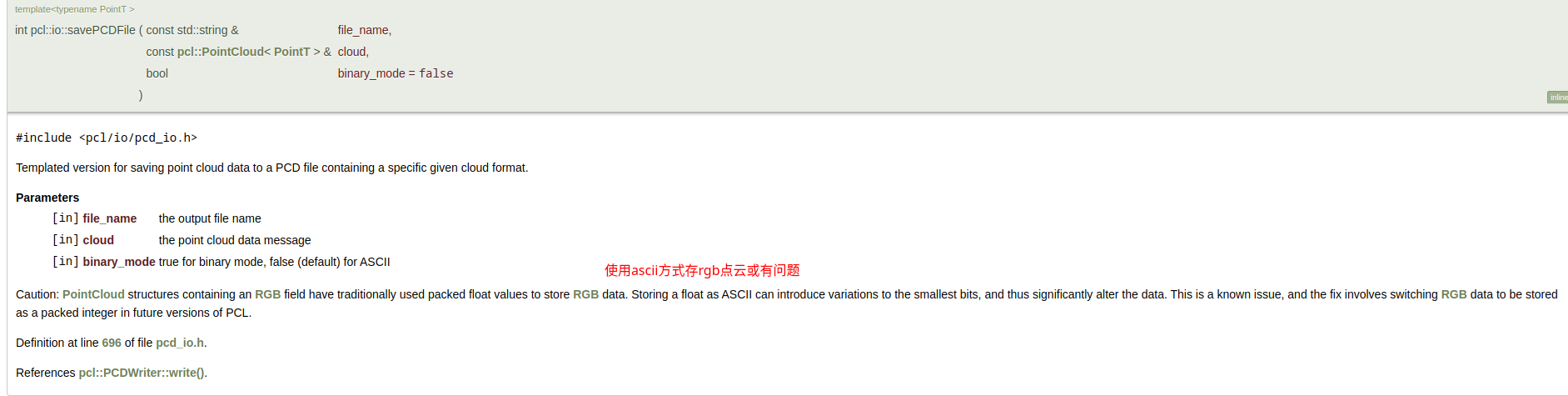
旧式接口
// 以下均为以前的API,现已统一用savePCDFile来替代
pcl::io::savePCDFileASCII("file.pcd", cloud);
pcl::io::savePCDFileBinary("file.pcd", cloud);
pcl::io::savePCDFileBinaryCompressed("file.pcd",cloud);
Read
typedef pcl::PointXYZ PointType;
pcl::PointCloud<PointType>::Ptr cloud(new pcl::PointCloud<PointType>);
if (pcl::io::loadPCDFile<PointType>("file.pcd", *cloud) == -1) {
PCL_ERROR("Couldn't read file\n");
return (-1);
}
Visualize
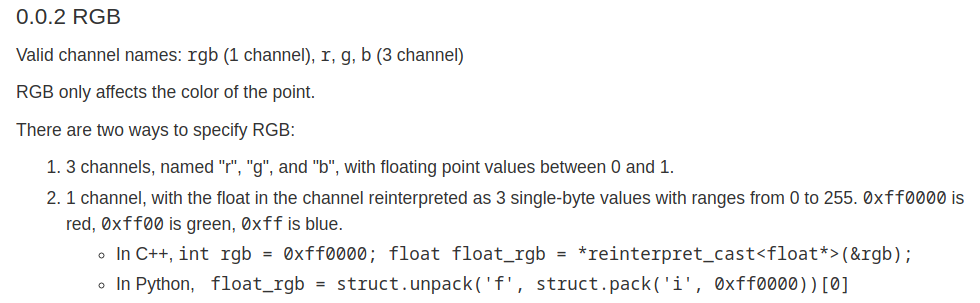
Pseudo Color
void RGBpointAssociateToMap(PointType const *const pi,
pcl::PointXYZRGB *const po) {
Eigen::Vector3d point_curr(pi->x, pi->y, pi->z);
Eigen::Vector3d point_w = q_w_curr * point_curr + t_w_curr;
po->x = point_w.x();
po->y = point_w.y();
po->z = point_w.z();
int reflection_map = pi->curvature * 10;
if (reflection_map < 30) {
int green = (reflection_map * 255 / 30);
po->r = 0;
po->g = green & 0xff;
po->b = 0xff;
} else if (reflection_map < 90) {
int blue = (((90 - reflection_map) * 255) / 60);
po->r = 0x0;
po->g = 0xff;
po->b = blue & 0xff;
} else if (reflection_map < 150) {
int red = ((reflection_map - 90) * 255 / 60);
po->r = red & 0xff;
po->g = 0xff;
po->b = 0x0;
} else {
int green = (((255 - reflection_map) * 255) / (255 - 150));
po->r = 0xff;
po->g = green & 0xff;
po->b = 0;
}
}
rviz
def bgr_to_hex(color_np):
"""
Args:
color_np:{n,3} [b,g,r]
b = color_np[:, 0]
g = color_np[:, 1]
r = color_np[:, 2]
"""
rgb_arr = np.array((color_np[:, 2] << 16) | (color_np[:, 1] << 8) | \
(color_np[:, 0] << 0), dtype=np.uint32)
# 实测上只能用这种方式修改,不能使用astype转换
rgb_arr.dtype = np.float32
return rgb_arr
ROS
Convert
PCL to ROS
pcl::PointCloud<pcl::PointXYZRGB> colored_pointcloud;
sensor_msgs::PointCloud2 output_msg;
pcl::toROSMsg(colored_pointcloud, output_msg);
output_msg.header = input.header;
instance_pointcloud_pub_.publish(output_msg);
Transform
ROS Pointcloud+ROS TF+Eigen TF
bool LidarApolloInstanceSegmentation::transformCloud(const sensor_msgs::PointCloud2& input, sensor_msgs::PointCloud2& transformed_cloud, float z_offset)
{
// transform pointcloud to target_frame
if (target_frame_ != input.header.frame_id)
{
try
{
geometry_msgs::TransformStamped transform_stamped;
// 得到target_frame_->input_frame的坐标系变换;input_frame在target_frame_的位姿;将input_frame的点云转换到target_frame_的坐标变换
transform_stamped =
tf_buffer_.lookupTransform(target_frame_, input.header.frame_id, input.header.stamp, ros::Duration(0.5));
Eigen::Matrix4f affine_matrix = tf2::transformToEigen(transform_stamped.transform).matrix().cast<float>();
pcl_ros::transformPointCloud(affine_matrix, input, transformed_cloud);
transformed_cloud.header.frame_id = target_frame_;
}
catch (tf2::TransformException& ex)
{
ROS_WARN("%s", ex.what());
return false;
}
}
else
{
transformed_cloud = input;
}
// move pointcloud z_offset in z axis
// 点云z数据 + z_offset
sensor_msgs::PointCloud2 pointcloud_with_z_offset;
Eigen::Affine3f z_up_translation(Eigen::Translation3f(0, 0, z_offset));
Eigen::Matrix4f z_up_transform = z_up_translation.matrix();
pcl_ros::transformPointCloud(z_up_transform, transformed_cloud, transformed_cloud);
return true;
}
备注
PCL有一个点云TF的接口;对于对点的坐标进行变换的话,不是用遍历的方案,而是采用矩阵相乘的方式
Q&A
反射强度与材料的关系
以下资料参考速腾16线数据手册
材料 |
反射强度 |
|---|---|
黑色介质+漫反射 |
约等于0 |
白色介质+漫反射 |
小于100 |
半反透介质+镜面反射 |
大于100 |
全反射 |
等于255 |
Tool
CloudCompare
Install
方法一:可以直接使用apt安装,但是不支持pcd点云文件的导入
sudo apt install cloudcompare
方法二:使用snap安装,但是需要更换到edge版本
sudo snap install cloudcompare
sudo snap refresh --edge cloudcompare
Q&A
Reference
官方教程:包括剔除点云(仅支持2D裁剪)、配准(自动配准、交互式配准:自己选配准点)