Process
Status
ps
ps # 查看当前终端的进程(BSD)
ps (-l) # 查看当前终端的进程[l:Long format]
ps aux # 显示当前系统中的进程(以PID升序的顺序)
ps -ef # 查看当前系统的进程(含父进程)
ps -o ppid (子进程pid) # 查子进程ppid(-o:指定输出项)
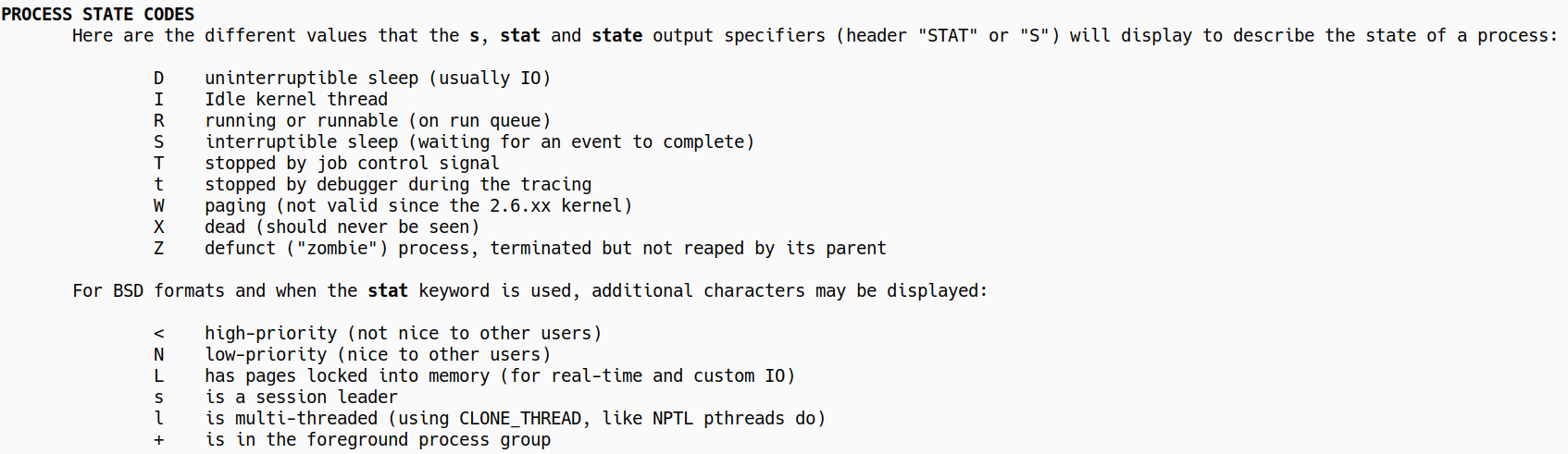
进程的状态
p525《鸟叔的LINUX私房菜》
R: running 进程正在运行
S: sleep 进程正在睡眠状态(IDLE),但可以被唤醒(signal)
D: 不可被唤醒的睡眠状态(该进程可能在等待IO)
T: stop 停止状态
Z: zombie 进程已停止但无法从内存中被删除
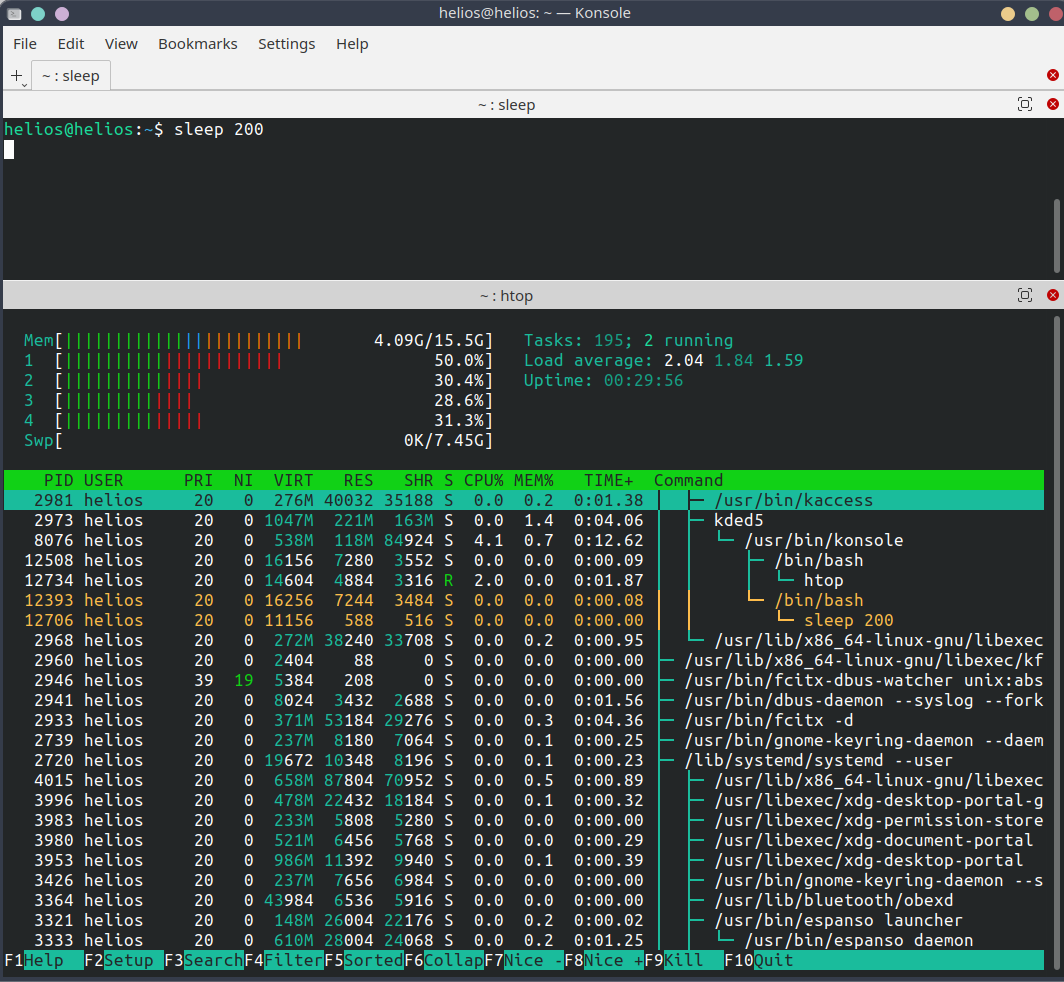
htop
htop
-u(--user):显示指定用户
-p(--pid):显示指定pid
-t --tree:树状形式显示进程(实际体验绝对pstree比较清晰)
取消显示线程
htop中将线程视为进程,所以会看到多个分配了同样资源的进程,可通过设置进行取消
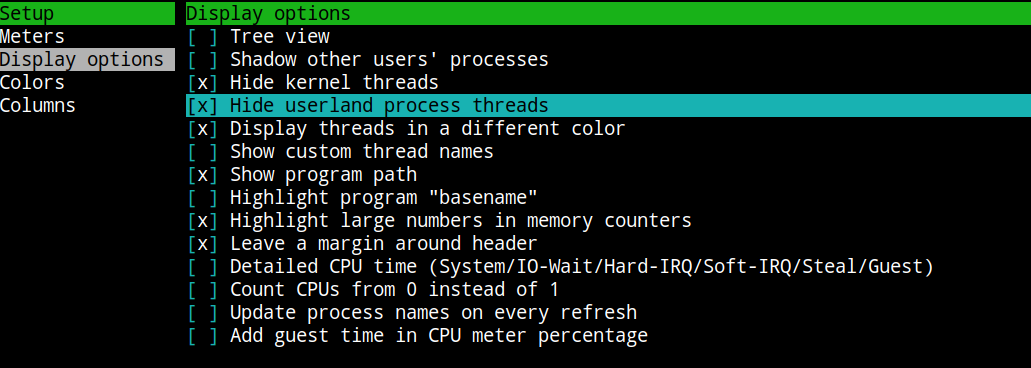
htop界面选项
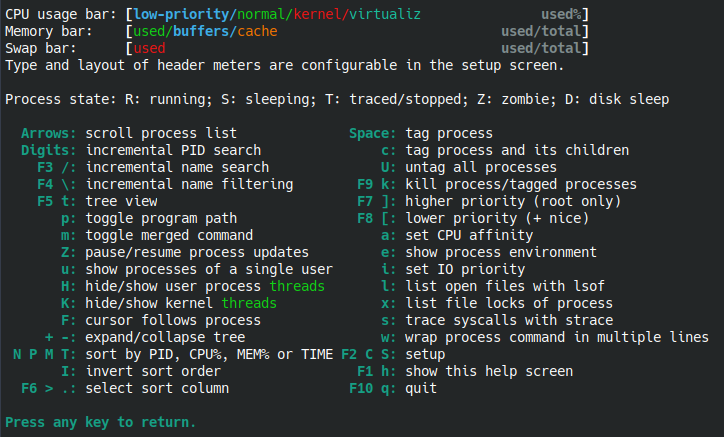
功能键 |
作用 |
|---|---|
N P M T |
基于PID / CPU% / MEM% / TIME进行排序 |
t |
看目录树 |
根据进程查文件 / 根据文件查进程
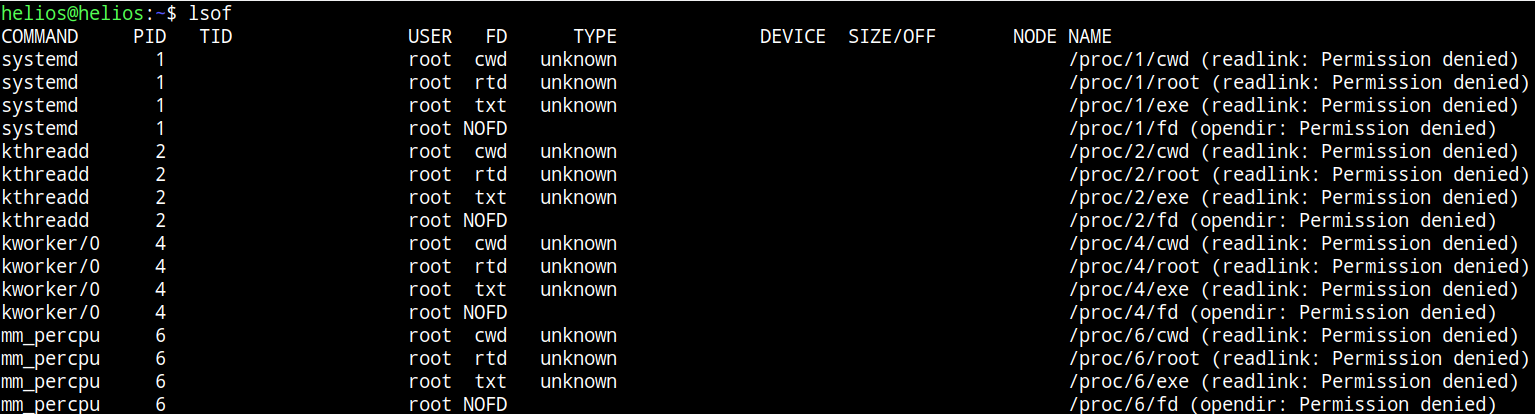
列出系统中正使用的文件(list open file)
lsof
lsof -u <user_name> # 查看指定用户在使用的文件
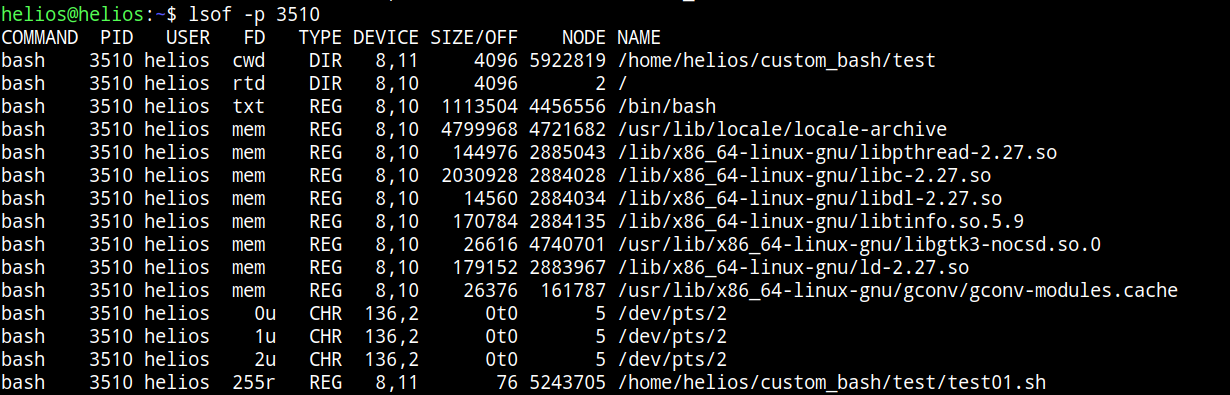
lsof -p <pid> # 查看指定进程所使用的文件资源
根据文件/文件夹查进程
根据文件查进程,该命令行等效于fuser的效果
lsof <file_name 绝对 or 相对>
fuser <file_name>
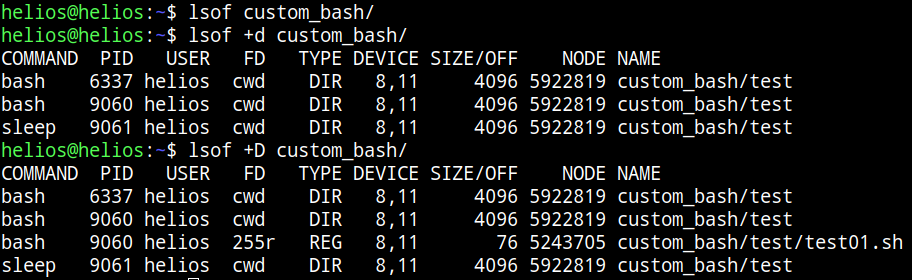
根据文件夹查进程(大小写区别暂时未详细理解)
lsof +d / +D <dir_name>

根据port查调用方
lsof -i :22
查看进程树
pstree
-s:查看指定pid的父进程和子进程
-u:显示user
-p:显示pid号
-T:只显示进程,不显示线程
-n:使用pid号进行排序



Signal
SIGHUP
session leader关闭时,会下发一个
SIGHUP信号给进程session的每个进程系统对
SIGHUP信号的默认处理是终止收到该信号的进程
Kill
根据进程ID来结束
kill <PID>
根据启动时的命令名进行结束
killall <command>
-w: 阻塞,直到该进程成功结束
NOTE
此处的command指该字段的第一列命令(因此要关掉roscore则需要killall /usr/bin/python3而不是python);在实测过程中 killall roscore 也行

kilall后面应该输出什么样的command?
方法一:参考出来的第二个字段
cat /proc/<pid>/stat

不同信号触发的关闭
用这种方式强制关闭ros launch进程,不会同时关闭其管理的节点进程
kill -s 9 <pid> # 进程终端立即执行(资源回收会不彻底)
kill -s 17 <ppid> # 让父进程回收僵尸进程 -CHLD
Terminology
僵尸进程
僵尸进程是一个调用了
exitsystem call的子进程,但仍有一些资源(entry)保留(e.g pid, exit status)在进程表(process table)中。要真正的结束这些进程(即要回收在进程表中的剩下的资源),需要父进程读取子进程的exit status,然后去调用waitsystem call,来将这些资源从进程表中被移除(这个过程称之为"reaped")僵尸进程不能够通过发
kill -s 9/15来结束(可以理解为已经被kill了,再kill也没用),只能由父进程对它进行回收处理。可以发-17(CHLD)信号给僵尸进程的父进程让其回收僵尸进程。(但在实测中不一定能奏效,可能是应用程序没有写好,接收到信号后不会调用wait())僵尸进程是一个正常进程结束的必经状态。正常进程->exit->僵尸进程->父进程wait->所有资源释放成功
孤儿进程
孤儿进程指失去原来父进程(父进程已经完成或终止),但仍在运行的子进程。当前的父进程为
init的进程
前后台、守护进程
前/后台进程:占用/不占用终端的进程
守护进程:一种特殊的后台进程,父进程为systemd(真正脱离了终端(detached),不能放置于前台)
SID
SID(session id)和GID(group id)都是进程的一个组织单位(unit),适用于管理进程。比如session leader关掉后,其余的sid一样的进程都会关闭。具体是下发一个
SIGHUP的信号进行管理。session的范围会大于group的范围
Q&A
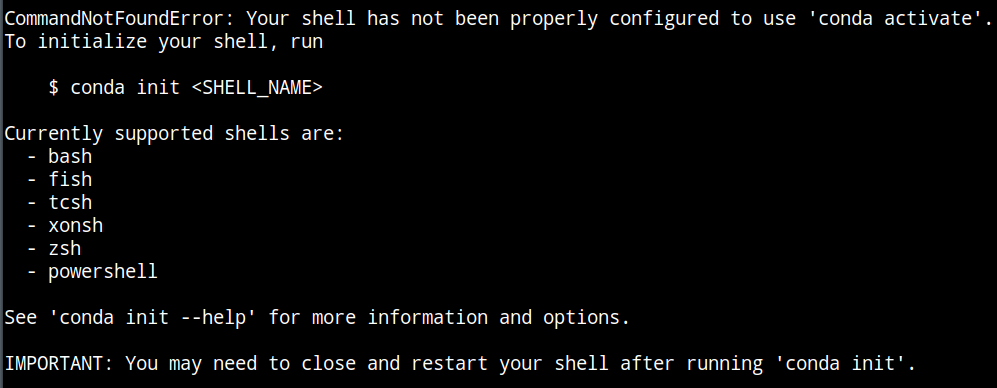
为什么用bash执行含conda命令的脚本时会报错?
-
如何判断命令是外部命令还是内部命令?

为什么kill/killall没有效果?
默认是发-15的信号,但这个信号可以被程序选择性忽略;所以可以使用-9来强制结束进程
fork twice的作用?
让
init管理子进程,从而让exit()后的子进程(i.e. 僵尸进程)能够及时地被处理假定有两个进程处理任务,一个是父进程,一个是子进程,父进程处理的时间比子进程的处理时间要长。子进程exit()成为僵尸进程后,父进程需要一段时间才能执行wait()来处理子进程,也就是僵尸进程会持续一定的时间。因此可以forking两次,将子孙(grandson)节点孤儿化,交由
init来管理,那就能及时地处理僵尸进程
进程和线程的优点和不足
需要更多的内存 / 更少的内存使用量
父进程先于子进程关闭,则子进程会成为孤儿进程(应该是孤儿进程) / 进程关闭后,所有线程将关闭
进程的数据交互需要更大的代价 / 共享内存,数据交互开销更小
进程间的虚拟内存空间是独立的;线程共享内存,需要解决并发时的内存问题
需要进程间通信;可以通过队列和共享内存进行通信
创建和关闭相对较慢 / 相对更快
更容易debug和写代码 / debug和写代码较难
shell如何执行命令行
命令行的执行默认使用bash脚本
<command>
等价于
/bin/bash -c <command>
每个shell(e.g. bash)会先fork出一个子进程,然后命令行再在这个子进程上运行
在一个终端中启动改了后台进程和前台进程,这两个进程的父进程都是bash进程

Python
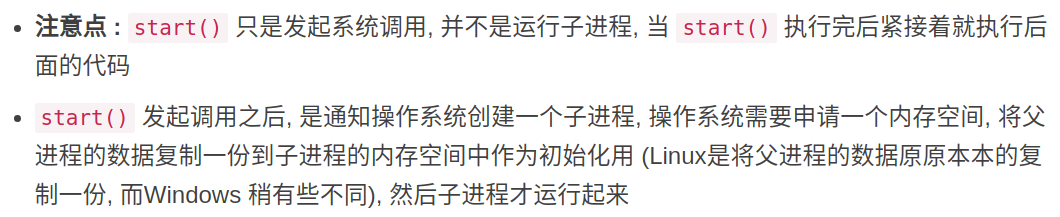
daemon退出的进程/线程,资源回收并不彻底multiprocess的start只是发起系统调度(类似于
fork,但不exec),还要一系列操作才能开始执行target(detail)
某些条件下,multiprocess创建的进程在进程执行完前都不能接收
SIGINT信号 (detail)
信号的执行过程
当收到信号时,底层(c-level)的 信号处理函数 将设置一个标志位,告知VM下一次执行python字节码时应该执行上层(python-level)的 信号处理/回调函数 。从某种角度说,python的信号处理函数可能长时间不会被执行。比如VM在长时间执行C++的二值代码,而不执行python字节码时。
Qt
为什么ctrl+c无法中断Qt应用程序?
python的中断回调函数只会在执行python字节码期间时才能执行。如果VM一直在执行c++的二值代码,则中断回调函数则无法执行。
import signal
import sys
from PyQt5.QtCore import QTimer
# Your code here
from PyQt5.QtWidgets import QApplication, QMessageBox
def sigint_handler(*args):
"""Handler for the SIGINT signal."""
sys.stderr.write('r')
if QMessageBox.question(None, '', "Are you sure you want to quit?",
QMessageBox.Yes | QMessageBox.No,
QMessageBox.No) == QMessageBox.Yes:
QApplication.quit()
if __name__ == "__main__":
signal.signal(signal.SIGINT, sigint_handler)
app = QApplication(sys.argv)
timer = QTimer()
timer.start(500) # You may change this if you wish.
timer.timeout.connect(lambda: None) # Let the interpreter run each 500 ms.
# Your code here.
sys.exit(app.exec_())
ROS
roslaunch为父进程,其启动的节点为子进程

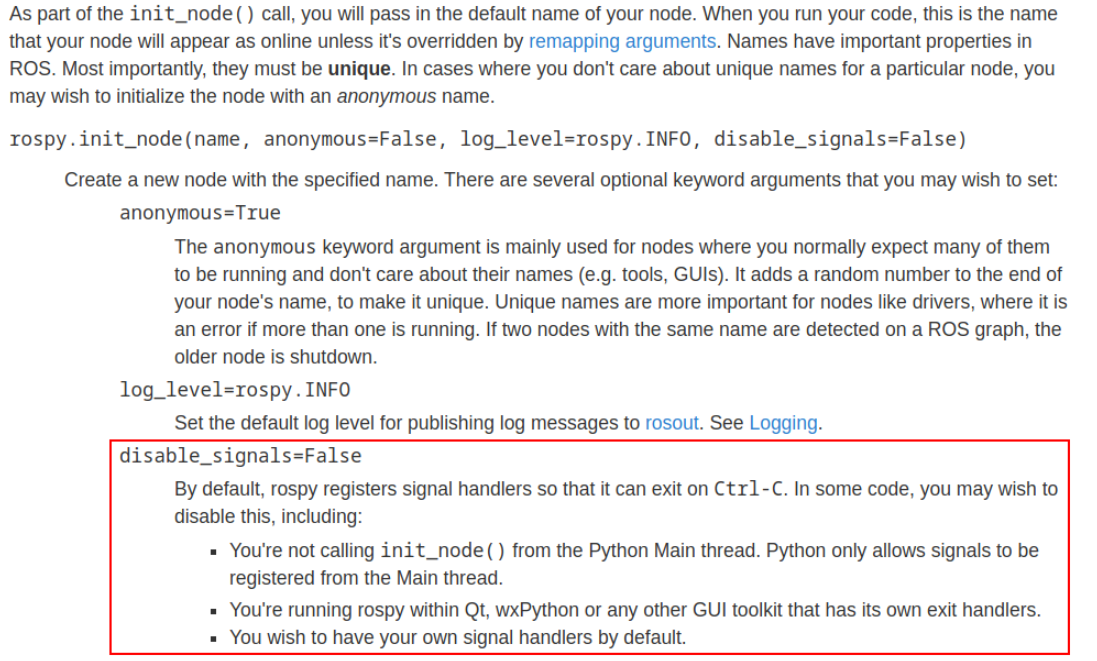
rospy的节点失能键盘中断函数
在bash启动的roslaunch可以使用kill -s 2(键盘中断)来中断掉
由于kill -s 9 或者程序资源没有回收完全的原因,即使对应的进程已经关闭,但是还是可以通过
rosnode看到该节点(该节点没有完全从rosmaster中注销成功),若要通过命令行注销则需要使用rosnode cleanup使用
kill -s 9作用于launch进程时,其管理的节点可能不会成功退出,因此在rosnode中仍然能看到,使用kill -s 2这种则可以顺利退出所有的节点